Инновационные беспилотные мультироторные вертолеты и воздушная фото и видео съемка | ||||||||||||||||||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||||||||||||||||||
| ПРОДУКЦИЯ Почему наши летающие аппараты лучшие? В чем наши секреты? Высочайшие стандарты разработки и изготовления конструкций, электронных плат и программного кода наших изделий обеспечивают потрясающее качество полета наших БПЛА, качество связи и удобство пользования.
В чем же ключевые особенности наших разработок? Все просто - важны детали! Все электронные платы и узлы летательного аппарата, а также всё программное обеспечение (бортовое и наземное, телеметрия, протоколы связи) - это полностью наша разработка и производство! Таким образом мы имеем полный контроль над разработкой, производством, обслуживанием и развитием нашей продукции! Мы можем осуществлять любые доработки и изменения по требованию наших заказчиков в кратчайшие сроки. Все узлы наших летательных аппаратов высоконадежные (отказоустойчивые), а все (без исключения) интерфейсы связи между отдельными блоками ЛА выполнены на промышленной высоконадежной помехозащищенной шине CAN. Это дает уверенность в надежности прохождения сигналов и связи между электронными блоками летательных аппаратов и наземных комплексов. Особенно это касается связи между блоками бортового полетного контроллера, а также между полетным контроллером и электронными регуляторами бесколлекторных двигателей БЛА.
ПОДРОБНЕЕ ПРО ЭЛЕКТРОННЫЕ РЕГУЛЯТОРЫ БК-ДВИГАТЕЛЕЙ МОЖНО СКАЧАТЬ ЗДЕСЬ. Для оптимального выбора двигателей и пропеллеров, устанавливаемых на наших летательных аппаратах, мы разработали специализированный стенд автоматических измерений параметров винтомоторных пар. Это позволило провести глобальные исследования по подбору идеальных пар "двигатель-пропеллер" для разных БЛА.
В нашем бортовом программном обеспечении БПЛА алгоритмы стабилизации самого летательного аппарата не имеют зависимость от алгоритмов стабилизации аппарата в точке (навигации). Т.е. случаи срыва сигналов GPS/ГЛОНАСС не влияют на систему стабилизации самого ЛА в воздухе. Алгоритмы обработки сигналов датчиков стабилизации ЛА и обработки сигналов навигационных датчиков просто разделены. В программном обеспечении ЛА и наземной станции предусмотрена расширенная система спасения летательного аппарата при наступлении различных нештатных ситуаций: нарушении линий связи и управления ЛА, нарушением каналов телеметрии, нарушением (пропаданием) cигналов GPS/ГЛОНАСС, нарушении работы любого электронного регулятора двигателей или самого двигателя (отказ мотора), чрезмерном удалении от базы, разряде батареи питания ЛА, высоком уровне вибрации и прочих событиях. При наступлении любого из событий или нескольких событий сразу система спасения автоматически определяет приоритеты и отрабатывает заранее заданные команды в каждом нештатном случае, расчитанные на спасение ЛА и возвращение его к месту взлета или аварийную посадку на месте проишествия. Такая система спасения обеспечивает бесперебойную отработку нештатных ситуаций. Мы применяем системы дублирования в управлении ЛА для повышения надежности! Все электронные узлы системы связаны при этом по высоконадежной помехозащищенной шине CAN. Резервные электронные блоки подключены параллельно основным по этой шине CAN. Летательный аппарат продолжает непрерывно выполнять полетное задание в случаях переключения на резервные блоки и продолжает функционировать в штатном режиме. В устройстве ЛА предусмотрен блок "черного ящика", т.е. устройство записи всех параметров полета на носитель информации, и возможность последущего анализа этой информации в пошаговом режиме при любой необходимости. Это дает возможность анализировать любые штатные и нештатные ситуации и принимать решения об ошибках в управлении оператором или автоматикой. Т.е. существует возможность получения и изучения логов полета. ЛА имеет все режимы управления полетом: полностью ручной, удержание высоты, удержание аппарата в точке, автовзлет, автопосадка, полет по точкам, выполнение автоматических миссий (включающих автовзлет, полет по точкам и выполнение заданий в каждой точке, возврат на базу, автопосадку), облет вокруг точки интереса на заданном растоянии по окружности с постоянным удержанием курса на точку интереса, пролеты по заданным оператором "воздушным рельсам в 3D-режиме", выполнение последовательности действий, прописанных в полетном задании. Полетное задание (миссия) должна составляться оператором и отправляться в ЛА либо в ручном режиме (каждая точка заносится в список в режиме он-лайн при реальном полете оператором) либо на наземной станции или стороннем компьютере по карте. В случае составления полетного задания (миссии) по карте на компьютере оно передается в ЛА либо дистанционно по каналам связи (модему) либо с помощью носителей (флэш-карт), устанавливаемых оперативно в ЛА. При установке флэш-карты с полетным заданием ЛА автоматически приступает к его выполнению при включении или по команде оператора. При получении полетного задания дистанционно по каналам связи от наземной станции ЛА приоритетно выполняет это поленое задание. Полетное задание возможно изменять, обновлять или прерывать в процессе его выполнения с помощью команд с наземной станции или отсылки на ЛА нового задания. Приоритет всегда остается за последним поступающим оперативно полетным заданием или его изменением. Наземная станция имеет возможность управлять, получать данные и рассылать полетные задания одновременно на несколько БПЛА. В базовой комплектации наземная станция имеет возможность управлять одновременно 4-я летательными аппаратами. Опционально может поставляться программное обеспечение для наземной станции, не имеющее ограничение по количеству управляемых ЛА. Летательные аппараты могут быть обьединены в сеть с помощью специального программного обеспечения, в которой аппараты "видят" друг друга, знают положение в пространстве и не позволяют аппаратам пересекаться в пространстве. Кроме того, по этой сети можно передавать данные в обе стороны с наземной станции на дальние аппараты, прямая связь с которыми затруднительна (режим ретрансляции сигналов). Сеть можно использовать и для группового управления БПЛА в режиме группового выполнения специальных миссий. Одни аппараты могут выступать "ведущими", другие - "ведомыми" и двигаться за первыми на заданном растоянии и высоте... При этом, наземная станция отображает для оператора всю текущую информацию по всем БПЛА, любую требуемую телеметрическую информацию с каждого борта ЛА. При управлении полетом ЛА имеется возможность указания целей на карте в реальном времени одним движением (одним движением руки оператора ставится точка на карте и ЛА автоматически отправляется к этой точке в любой момент в режиме он-лайн). Наземная станция обеспечивает работу с картой в местах без доступа к интернет. Интересующий фрагмент карты во всех масштабах загружается заранее там, где это удобнее оператору.
В наземной станции всегда отображается "пробег" (часы налета) по каждому ЛА (он прописывается в каждом ЛА автоматически. При наступлении времени для проведения необходимых регламентных (сервисных) работ выводится напоминание на экран наземной станции о необходимости таких работ (сервисный интервал). Эта мера необходима для поддержания летательных аппаратов в технически исправном состоянии. В бортовом программном обеспечении наших БПЛА предусмотрен режим возвращения аппарата в штатное состояние в случае ураганного порыва ветра и перевертывании аппарата в полете "с ног на голову". Этот автоматический режим ("ванька-встанька") необходим при автоматических полетах, когда аппарат, выполняющий автоматическую миссию, находится на значительной высоте и удалении и не виден оператору. При попадании в штормовые порывы ветра ЛА должен быть защищен от переворачивания и иметь специальный режим автоматического (без вмешательства оператора) возвращения ЛА в штаное положение в горизонт. Электронные узлы и программное обеспечение наших БПЛА обеспечивают широкие возможности управления работой нескольких независимых каналов нагрузки (не менее 8), бортовых огней, прожектора на ЛА, исполнительных механизмов полезной нагрузки, системой звуковых сигналов. Во всех наших БПЛА предусмотрено полное управление полезной нагрузкой и оператором и в полном автоматическом режиме. Мы используем ГЛОНАСС и GPS системы, как порознь так и одновременно для увеличения точности системы позиционирования. Наши БПЛА обеспечивают точность позиционирования от 10 до 70 см (в зависимости от кол-ва спутников в данной местности). Для автоматического взлета и посадки БПЛА требуется площадка размером всего 2х2 метра! Мы первые разработали и реализовали в реальных условиях систему автоматического взлета и посадки БЛА на металлическую палубу дрейфующего (движущегося) судна. Также опробована система взлета с движущихся по пересеченной местности металлических гусенечных и колесных транспортных средств!
|
 | ||||||||||||||||||||||||||||||||||||||||||||||
| Главная | ||||||||||||||||||||||||||||||||||||||||||||||||
| ||||||||||||||||||||||||||||||||||||||||||||||||
 Нашим приоритетом является качество и красота решений, а получаемый результат служит тому подтверждением!
Нашим приоритетом является качество и красота решений, а получаемый результат служит тому подтверждением!







 Наши высокоскоростные и высоконадежные электронные регуляторы оборотов двигателей имеют защиту
от остановки при попадании пропеллеров на
препятствия - ни регулятор, ни двигатель не пострадают при
кратковременных пиковых токовых перегрузках! А в случаях любых аварийных остановок двигателей мгновенно сработает система перезапуска контроллеров. При этом, перезапуск будет производится до тех пор, пока не устранится препятствие для вращения пропеллера двигателя. Также предусмотрена защита
от температурных перегрузок (перегрев) и прочих нештатных ситуаций. Наши электронные регуляторы оборотов бесколлекторных двигателей надежно работают с любыми существующими двигателями, включая многополюсные, без срывов.
Наши высокоскоростные и высоконадежные электронные регуляторы оборотов двигателей имеют защиту
от остановки при попадании пропеллеров на
препятствия - ни регулятор, ни двигатель не пострадают при
кратковременных пиковых токовых перегрузках! А в случаях любых аварийных остановок двигателей мгновенно сработает система перезапуска контроллеров. При этом, перезапуск будет производится до тех пор, пока не устранится препятствие для вращения пропеллера двигателя. Также предусмотрена защита
от температурных перегрузок (перегрев) и прочих нештатных ситуаций. Наши электронные регуляторы оборотов бесколлекторных двигателей надежно работают с любыми существующими двигателями, включая многополюсные, без срывов. Мощные электронные регуляторы оборотов бесколлекторных двигателей, разработанные RusAeroLab, обеспечивают полную
обратную телеметрию всей информации по каждому двигателю БЛА,
передавая ее в полетный контроллер по промышленной помехозащищенной шине CAN. Далее эта информация поступает на наземную
станцию управления (НСУ) по каналу телеметрии. По каждому двигателю и регулятору
летательного аппарата оператор наземной станции управления (НСУ) оперативно видит все параметры: обороты
двигателей, напряжения, токи, температуры, прочую техническую
информацию, которая необходима как для автоматических систем контроля за состоянием БЛА, так и для самого оператора БЛА.
Мощные электронные регуляторы оборотов бесколлекторных двигателей, разработанные RusAeroLab, обеспечивают полную
обратную телеметрию всей информации по каждому двигателю БЛА,
передавая ее в полетный контроллер по промышленной помехозащищенной шине CAN. Далее эта информация поступает на наземную
станцию управления (НСУ) по каналу телеметрии. По каждому двигателю и регулятору
летательного аппарата оператор наземной станции управления (НСУ) оперативно видит все параметры: обороты
двигателей, напряжения, токи, температуры, прочую техническую
информацию, которая необходима как для автоматических систем контроля за состоянием БЛА, так и для самого оператора БЛА. Мы применяем в наших БЛА специально разработанные в RusAeroLab высокоэффективные бесколлекторные двигатели. При производстве наших двигателей применяется ручная намотка толстым монопроводом "виток к витку" (в отличии от всех других производителей, которые наматывают двигатели стандартным автоматическим способом хаотично пучком тонких проводов). Кроме того, при производстве наших двигателей мы используем ряд Ноу-Хау, которые значительно повышают эффективность, а значит К.П.Д. двигателей. Это конечно же приводит к увеличению времени полета наших БЛА. Все произведенные бесколлекторные двигатели проходят строгий контроль качества и отбор по требованиям к характеристикам. Кроме того, перед установкой на БЛА наши двигатели проходят "обкатку" на высоких оборотах в течении тестового интервала с измерением уровня вибрации. Для установки бесколлекторных электродвигателей на наши БЛА применяется специальная конструкция, которая дополнительно устраняет нежелательные вибрации и резонансы.
Мы применяем в наших БЛА специально разработанные в RusAeroLab высокоэффективные бесколлекторные двигатели. При производстве наших двигателей применяется ручная намотка толстым монопроводом "виток к витку" (в отличии от всех других производителей, которые наматывают двигатели стандартным автоматическим способом хаотично пучком тонких проводов). Кроме того, при производстве наших двигателей мы используем ряд Ноу-Хау, которые значительно повышают эффективность, а значит К.П.Д. двигателей. Это конечно же приводит к увеличению времени полета наших БЛА. Все произведенные бесколлекторные двигатели проходят строгий контроль качества и отбор по требованиям к характеристикам. Кроме того, перед установкой на БЛА наши двигатели проходят "обкатку" на высоких оборотах в течении тестового интервала с измерением уровня вибрации. Для установки бесколлекторных электродвигателей на наши БЛА применяется специальная конструкция, которая дополнительно устраняет нежелательные вибрации и резонансы.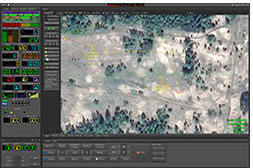 Наземная станция имеет развитые инструменты планирования автоматических миссий по карте. На карте оператором выбирается интересующая зона любой формы для автоматического облета.
При этом эта область карты автоматически загружается в наземную станцию во всех масштабах для дальнейшей работы без доступа к сети интернет.
При указании необходимых для миссии параметров полета (таких как высота полета, угол зрения обьективов камер, точность, шаг сетки точек полета,
скорости полета, ресурсов времени полета в зависимости от емкости батарей, максимального кол-ва точек остановки и времени удержании в каждой точке)
- остальные (не указанные оператором) параметры расчитываются автоматически. При указании строго нужных параметров (например, указан
угол зрения обьектива, высота полета и данные по батарее) програмное обеспечение наземной станции расчитывает все остальные параметры автоматически, составляет
одно полетное задание или разбивает задание на несколько миссий, если ресурсов батареи питания и времени полета БПЛА не достаточно для покрытия указанной площади. Если в комплексе
используется не один ЛА, а несколько, то программное обеспечение наземной станции разбивает полетное задание на несколько заданий и распределяет их по летательным аппаратам. Таким образом, в случае использования одного ЛА наземная станция
автоматически планирует количество вылетов (заходов) и выдает полетные задания для последовательной загрузки и выполнения этих
автоматических миссий. В случае использования нескольких ЛА, наземная станция автоматически расчитывает и распределяет по нескольким ЛА независимые
полетные задания для их одновременного выполнения несколькими ЛА. Это необходимо, например, при поиске людей на больших территориях, когда
ресурсы времени полета одного ЛА не могут перекрыть большие площади по карте и требуется совершить несколько вылетов (пошаговый поиск в секторах) или
разбить работу одновременно на несколько ЛА и ускорить поиск. Траетории полета каждого ЛА отображается на карте в реальном времени. Любую миссию
любого летательного аппарата оператор может прерывать либо видоизменять в режиме реального времени.
Наземная станция имеет развитые инструменты планирования автоматических миссий по карте. На карте оператором выбирается интересующая зона любой формы для автоматического облета.
При этом эта область карты автоматически загружается в наземную станцию во всех масштабах для дальнейшей работы без доступа к сети интернет.
При указании необходимых для миссии параметров полета (таких как высота полета, угол зрения обьективов камер, точность, шаг сетки точек полета,
скорости полета, ресурсов времени полета в зависимости от емкости батарей, максимального кол-ва точек остановки и времени удержании в каждой точке)
- остальные (не указанные оператором) параметры расчитываются автоматически. При указании строго нужных параметров (например, указан
угол зрения обьектива, высота полета и данные по батарее) програмное обеспечение наземной станции расчитывает все остальные параметры автоматически, составляет
одно полетное задание или разбивает задание на несколько миссий, если ресурсов батареи питания и времени полета БПЛА не достаточно для покрытия указанной площади. Если в комплексе
используется не один ЛА, а несколько, то программное обеспечение наземной станции разбивает полетное задание на несколько заданий и распределяет их по летательным аппаратам. Таким образом, в случае использования одного ЛА наземная станция
автоматически планирует количество вылетов (заходов) и выдает полетные задания для последовательной загрузки и выполнения этих
автоматических миссий. В случае использования нескольких ЛА, наземная станция автоматически расчитывает и распределяет по нескольким ЛА независимые
полетные задания для их одновременного выполнения несколькими ЛА. Это необходимо, например, при поиске людей на больших территориях, когда
ресурсы времени полета одного ЛА не могут перекрыть большие площади по карте и требуется совершить несколько вылетов (пошаговый поиск в секторах) или
разбить работу одновременно на несколько ЛА и ускорить поиск. Траетории полета каждого ЛА отображается на карте в реальном времени. Любую миссию
любого летательного аппарата оператор может прерывать либо видоизменять в режиме реального времени.